問 題
次の文章は、誘導機の速度制御に関する記述である。
誘導機の回転速度n[min-1]は、滑りs、電源周波数f[Hz]、極数pを用いてn=120・( ア )と表される。したがって、誘導機の速度は電源周波数によって制御することができ、特にかご形誘導電動機において( イ )電源装置を用いた制御が広く利用されている。
かご形誘導機ではこの他に、運転中に固定子巻線の接続を変更して( ウ )を切り換える制御法や、( エ )の大きさを変更する制御法がある。前者は、効率はよいが、速度の変化が段階的となる。後者は、速度の安定な制御範囲を広くするために( オ )の値を大きくとり、銅損が大きくなる。
巻線形誘導機では、( オ )の値を調整することにより、トルクの比例推移を利用して速度を変える制御法がある。
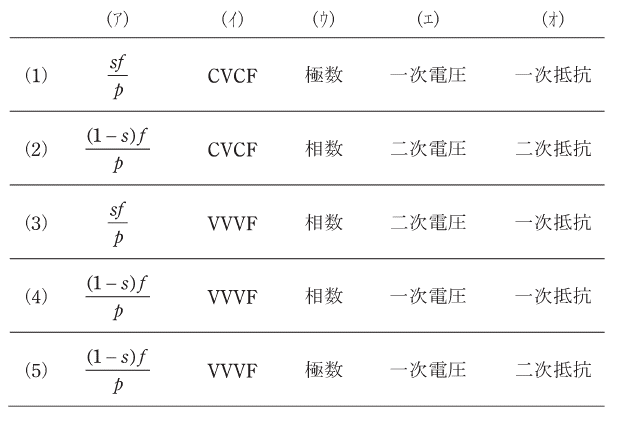
上記の記述中の空白箇所(ア)、(イ)、(ウ)、(エ)及び(オ)に当てはまる組合せとして、正しいものを次の(1)~(5)のうちから一つ選べ。
解 説
( ア )について、問3の解説でも紹介した通り、誘導機の同期速度Nsと滑りsの計算式は以下のように表すことができます。
![]()
![]()
- N:回転速度(回転子の速度) [min-1]
- s:滑り (単位なし)
- Ns:同期速度 [min-1]
- p:磁極の数 [極]
- f:周波数 [Hz]
また、これら2つの式を合わせると、回転子の回転速度Nを求める式に変形することもできます。
![]()
よって、( ア )には「(1-s)f/p」が入ります。
( イ )について、選択肢にあるCVCFとVVVFの違いは次の通りです。
- CVCF:定電圧定周波数、Constant Voltage Constant Frequency
- VVVF:可変電圧可変周波数、Variable Voltage Variable Frequency
( ア )で求めた式に周波数fが入っていることからもわかる通り、誘導電動機では可変周波数の電源装置を使います。また、周波数の変化によって電流も変化するとコイルが焼損するおそれがあるので、電流値を変えないで済むように電圧のほうが可変となっています。
よって、( イ )には「VVVF」が入ります。
( ウ )について、( ア )の解説で示した式をみると、回転速度Nを制御するためには
- 周波数f
- 磁極の数p
- 滑りs
のいずれかを変化させればよいということがわかります。このうち、周波数fについては( イ )を含む文章で説明しています。
( ウ )に入るのは、選択肢から考えると「極数」であると判断することができます。
また、( エ )と( オ )については、上記の3つの制御のうち滑りsを変化させる方法となります。滑りsを変化させる制御について、これは以下の3つのやり方があります。
- 一次電圧による制御
- 二次抵抗による制御
- 二次励磁による制御
一次電圧による制御では、一次電圧を変化させることにより電動機トルク特性曲線と負荷トルク特性曲線との交点を移動させ、滑りを変化させます。
二次抵抗による制御では、二次側端子に抵抗を接続し、この抵抗値を加減することで滑りを変化させます。この方法は巻線形誘導電動機においてのみ使える方法で、かご形には適用できません。
二次励磁による制御では、二次回路に可変周波の可変電圧を外部から加え、これを変化させることで滑りを変化させます。これも二次抵抗による制御と同様、巻線形でのみ使用できる方法で、かご形では使えません。
以上のことと選択肢を見比べることで、( エ )には「一次電圧」を入れ、( オ )には「二次抵抗」を入れるのが適切であると判断できます。
よって、
- ア:(1-s)f/p
- イ:VVVF
- ウ:極数
- エ:一次電圧
- オ:二次抵抗
となるので、正解は(5)です。
コメント